Die Norm SAE J3016 definiert die Klassifizierung und die unterschiedlichen Automatisierungsgrade. Sie wurde von SAE International (vormals: Society of Automotive Engineers) veröffentlicht und definiert seit Januar 2014 die branchenweite Norm.

Unser Weg zum autonomen Lkw
-
Level 0: keine Automation
Alle Fahrmanöver werden vom Fahrer durchgeführt. Kann Unterstützung durch Warn- oder Assistenzsysteme beinhalten.
-
Level 1: Assistenzsysteme
Das Fahrautomatisierungssystem (wenn aktiviert) führt einen Teil der dynamischen Fahraufgabe aus; entweder die Längs- oder die Querbewegungssteuerung des Fahrzeugs. Es wird auf Wunsch des Fahrers sofort ausgeschaltet.
Die Längsbewegungssteuerung des Fahrzeugs beinhaltet das Aufrechterhalten der gesetzten Geschwindigkeit sowie die Erkennung eines vorausfahrenden Fahrzeugs auf der Fahrbahn des betreffenden Fahrzeugs, die Einhaltung eines angemessenen Abstandes zum vorausfahrenden Fahrzeug sowie Beschleunigungs- oder Bremseingriffe, damit das Fahrzeug diese Geschwindigkeit bzw. diesen Abstand aufrechterhält.
Die Querbewegungssteuerung des Fahrzeugs über Beschleunigung und Verzögerung (im Betrieb), die das Erfassen der Fahrzeugposition bezogen auf Fahrspurbegrenzungen und die Anwendung von Lenk- und/oder Differentialbremsvorgängen zur Aufrechterhaltung einer angemessenen seitlichen Positionierung beinhaltet.
Nur bei definierten Szenarien werden die Fahrer durch Fahrerassistenzsysteme (zum Beispiel Spurhaltung) unterstützt.
Der Fahrer überwacht das System ständig und übernimmt bei Bedarf die delegierten Aufgaben.
-
Level 2: teilautomatisiertes Fahren
Nur bei geeigneten Szenarien übernimmt das System einen Teil der dynamischen Fahraufgabe, indem es das Fahrzeug in Quer- und Längsrichtung fährt. Es wird auf Wunsch des Fahrers sofort deaktiviert.
Der Fahrer überwacht das System ständig und übernimmt bei Bedarf die delegierten Aufgaben.
-
Level 3: bedingt automatisiertes Fahren
Nur bei geeigneten Szenarien übernimmt das System die gesamte dynamische Fahraufgabe. Es wird auf Wunsch des Fahrers sofort deaktiviert.
Der Fahrer muss das System nicht mehr ständig überwachen und kann sich mit Aufgaben befassen, die nicht mit dem Fahren zusammenhängen.
Sendet das System eine Übernahmeaufforderung an den Fahrer, muss dieser in kurzer Zeit in geeigneter Weise wieder übernehmen.
-
Level 4: hochautomatisiertes Fahren
Nur bei geeigneten Szenarien übernimmt das System die gesamte dynamische Fahraufgabe. Es schaltet sich gegebenenfalls aus, wenn ein Fahrer übernimmt.
Bei diesen Szenarien sendet das Fahrzeug keine Übernahmeaufforderung an den Fahrer, da es die Situation komplett selbst handhaben kann.
-
Level 5: vollautomatisiertes Fahren
Das vollautomatisierte Fahrzeug kann selbstständig auf allen kartographierten Straßen fahren, die von einem menschlichen Fahrer befahren werden können. Der Benutzer gibt einfach ein Ziel ein, und das Fahrzeug navigiert von ganz allein zu diesem Ziel.
Das System kann sämtliche Szenarien autark bewältigen und übernimmt die gesamte dynamische Fahraufgabe. Es schaltet sich gegebenenfalls aus, wenn ein Fahrer übernimmt.
Die Quelle finden Sie hier.
Technologie
Derzeit sind bei Level 2-Fahrzeugen zwei Sensoren im Einsatz – im nächsten Entwicklungsschritt bei Level 4 werden es deutlich mehr sein, die darüber hinaus auch weitaus leistungsstärker sind. Dies geht mit einem völlig neuen Datenaufkommen einher und stellt gleichzeitig extrem hohe Anforderungen an die Qualität der Datenverarbeitung. Dabei wird das Ziel verfolgt, die Wahrnehmung des Fahrers durch vollständig erfasste Verkehrs- und Fahrzeugsituationen mit Hilfe unterschiedlichster Sensortechnologien nachzustellen. Jeder Sensor leistet mit seinen speziellen Eigenschaften einen Beitrag zur Gesamtleistung und Sicherheit. Drei verschiedene technologische Ansätze bilden dafür die Grundlage: Radar, Kamera und Lidar. Die Sicherheit, Präzision und dauerhafte Verfügbarkeit der Systeme wird bereits bei der Markteinführung eine zentrale Rolle spielen. Analog zu Flugzeugen werden daher alle sicherheitsrelevanten Funktionen mit redundanten Systemen ausgestattet. Beim Ausfall des primären Steuerungssystems springen sie nahtlos ein und übernehmen deren Aufgaben.
In den letzten Jahren haben die Experten von Daimler Truck North America erfolgreich die erste skalierbare, sichere und zuverlässige Plattform für autonome Lkw entwickelt: Der „autonomous-ready Cascadia“ mit redundanten Funktionen basiert auf dem branchenführenden Flaggschiff-Modell der Daimler Truck Marke Freightliner und ist der Grundbaustein für selbstfahrende Lkw. Kritische Systeme wie beispielsweise Lenkung und Bremsen sind als Back-Up in zweifacher Ausführung vorhanden und werden kontinuierlich vom Fahrzeug überwacht um maximale Sicherheit zu gewährleisten. Bei Störungen oder Fehlern können die neu entwickelten redundanten Systeme den Lkw sicher kontrollieren. Der „autonomous-ready“ Freightliner Cascadia ist damit für die Integration von autonomer Software, Hardware und Rechensystemen vollumfänglich geeignet. Durch die Redundanz der Systeme kann der autonom fahrende Lkw wesentlich dazu beitragen, die Sicherheit im Straßenverkehr zu erhöhen. Daimler Truck sieht dies als weiteren wichtigen Schritt auf dem Weg zum unfallfreien Fahren.
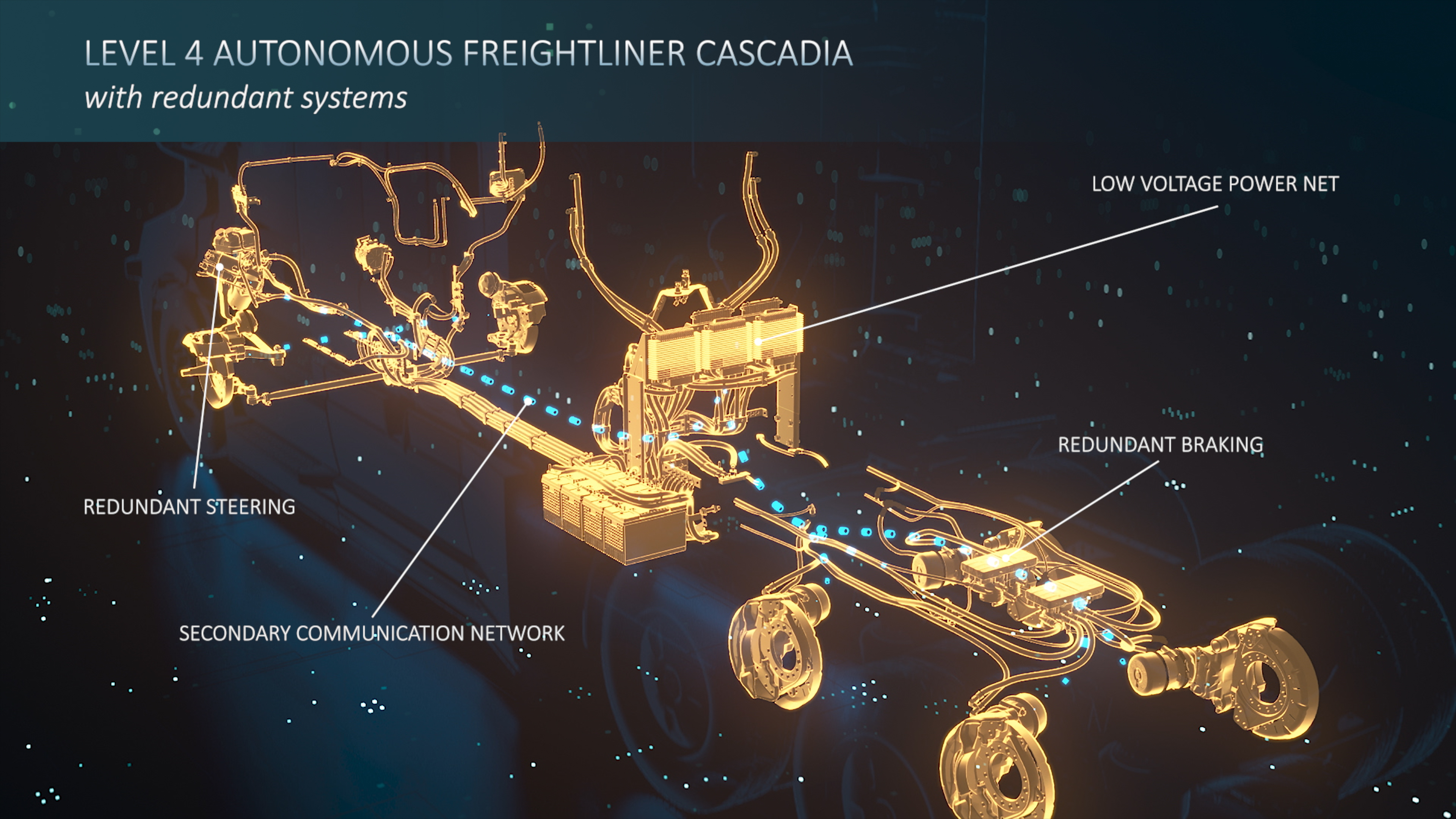
Level 4 Autonomous Freightliner Cascadia with redundant systems
Die Autonomous Technology Group
Der nächste Evolutionsschritt beim automatisierten Fahren in der Logistikbranche ist nach Meinung von Daimler Truck das autonome Fahren nach SAE Level 4. Der Zwischenschritt mit Level 3 würde sich für Logistik-Kunden nicht rechnen, da stets die Gesamtbetriebskosten eines Lkw als ausschlaggebender Faktor zu Grunde gelegt werden muss. Konkret lautet das Ziel: autonome Level 4 Lkw bis Ende der Dekade in Serie produzieren.
Und um das effizienter und schneller zu erreichen, hat Daimler Truck alle weltweiten Kompetenzen und Aktivitäten rund um das automatisierte Fahren in der Autonomous Technology Group gebündelt; die zentralen Aufgaben sind die Umsetzung der Gesamtstrategie für automatisiertes Fahren, Forschung und die Entwicklung der Fahrzeuge sowie der Aufbau einer erforderlichen Infrastruktur für den operativen Fahrzeugeinsatz.